We are an inter-disciplinary team of researchers working in visual computing, in particular, computer graphics and computer vision. Current areas of focus include 3D and robotic vision, 3D printing and content creation, animation, AR/VR, generative AI, geometric and image-based modelling, language and 3D, machine learning, natural phenomenon, and shape analysis. Our research works frequently appear in top venues such as SIGGRAPH, CVPR, and ICCV (we rank #14 in the world in terms of top publications in visual computing, as of 6/2023) and we collaborate widely with the industry and academia (e.g., Adobe Research, Amazon, Autodesk, Google, MSRA, Princeton, Stanford, Tel Aviv, and Washington). Our faculty and students have won numerous honours and awards, including FRSC, SIGGRAPH Outstanding Doctoral Dissertation Award, Alain Fournier Best Thesis Award, CS|InfoGAN Researcher Award, Google Faculty Award, Google PhD Fellowship, Borealis AI Fellowship, TR35@Singapore, CHCCS Achievement and Early Career Researcher Awards, NSERC Discovery Accelerator Awards, and several best paper awards from CVPR, ECCV, SCA, SGP, etc. Gruvi alumni went on to take up faculty positions in Canada, the US, and Asia, while others now work at companies including Amazon, Apple, EA, Facebook (Meta), Google, IBM, and Microsoft.
March 18, 2026
This year, 3DV is held in Vancouver from March 20 to 23rd. Prof. Manolis Savva is serving as the general chair, and Prof. Ali Mahdavi-Amiri as program chair. Prof. Angel Xuan Chang is serving as oral and nectar track session chair. In addition, SFU is holding a workshop for area chairs at the Burnaby campus on March 19th. There is also a SFU organized post-3DV workshop on research journeys in 3D on March 23rd afternoon.
The GrUVi lab will also be presenting the following six papers in 3DV as well as showcasing new work in the Nectar track.
March 18, 2026

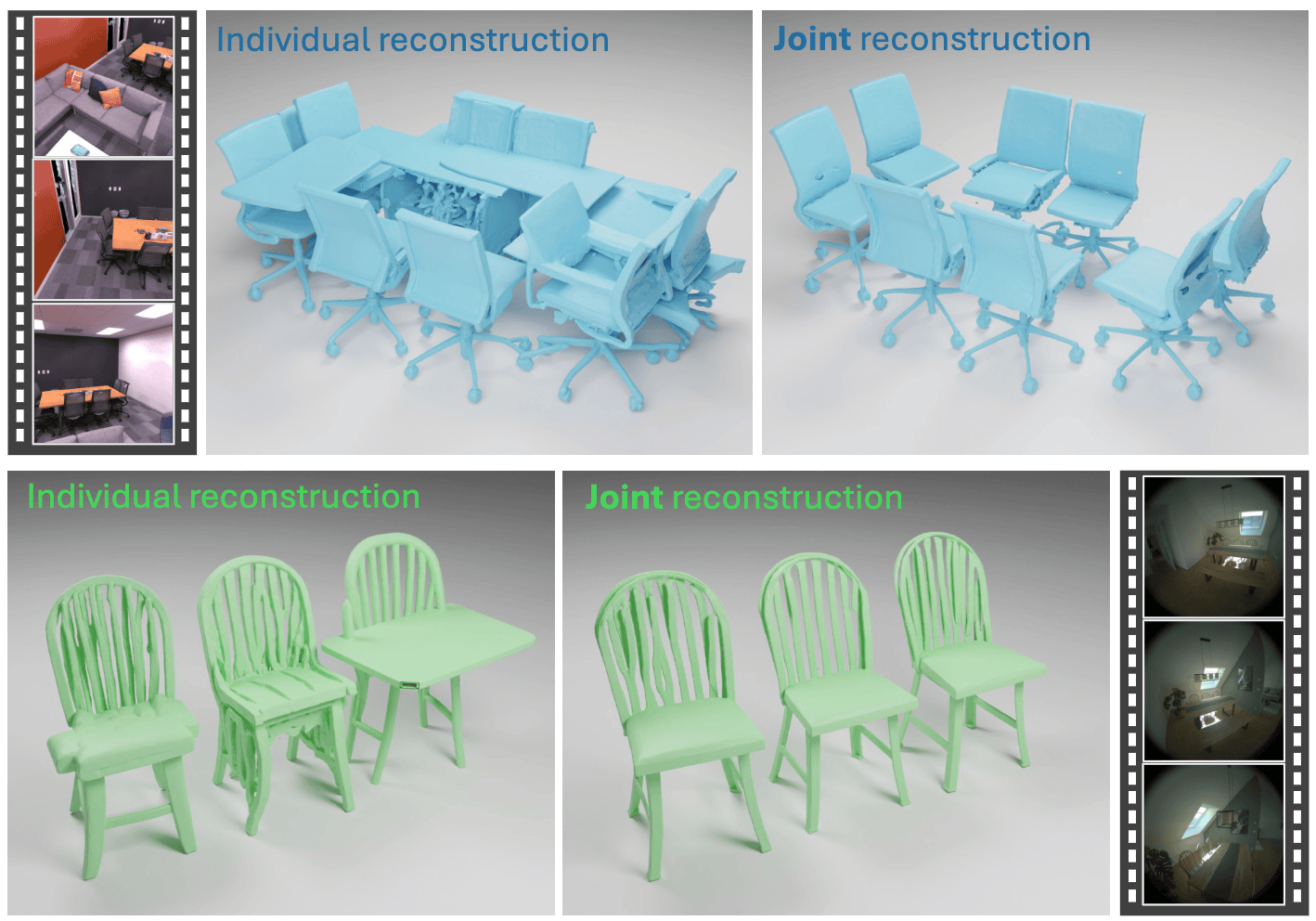
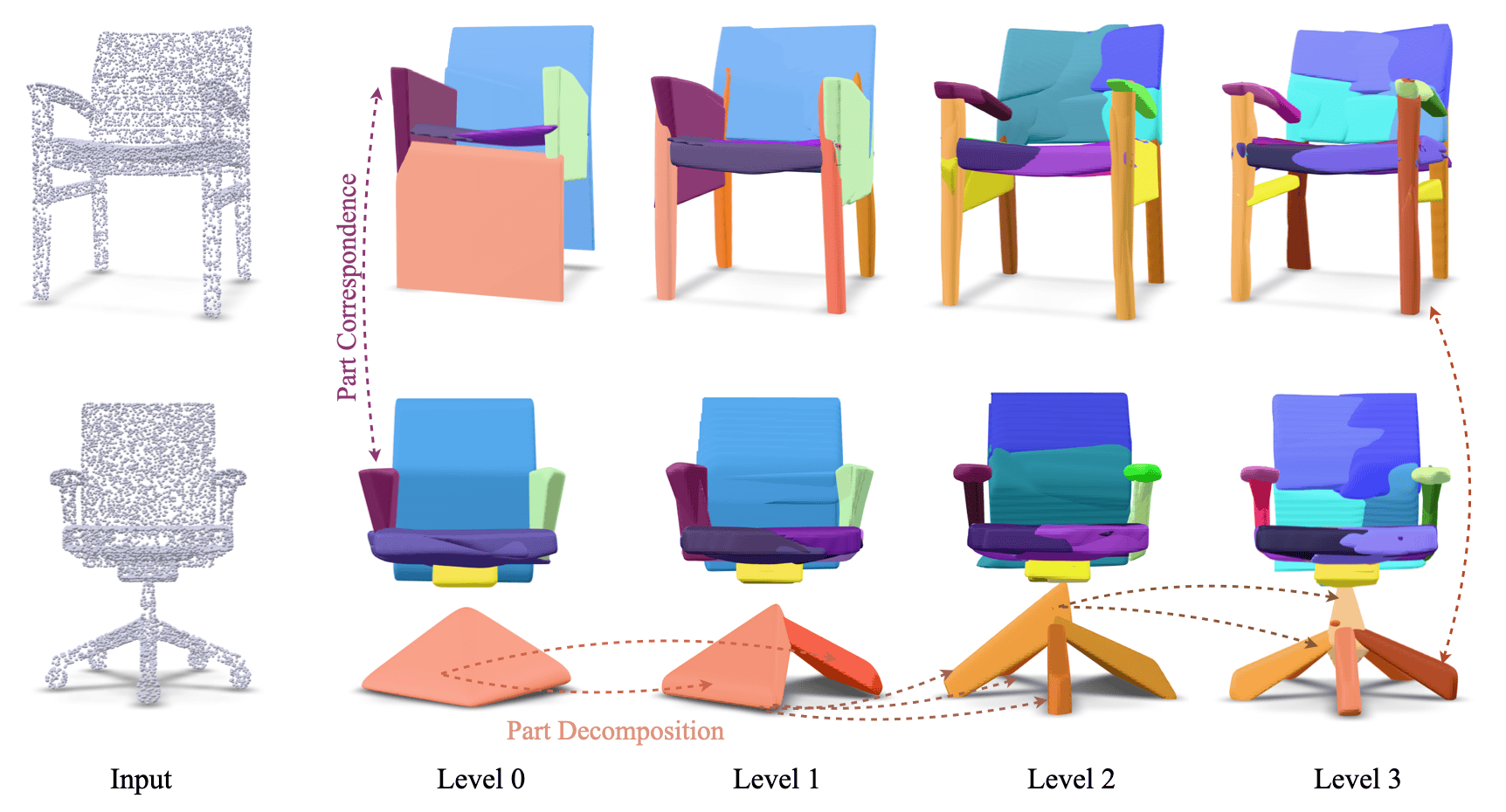
This year, 3DV is held in Vancouver from March 20 to 23rd. Prof. Manolis Savva is serving as the general chair, and Prof. Ali Mahdavi-Amiri as program chair. Prof. Angel Xuan Chang is serving as oral and nectar track session chair. In addition, SFU is holding a workshop for area chairs at the Burnaby campus on March 19th. There is also a SFU organized post-3DV workshop on research journeys in 3D on March 23rd afternoon. The GrUVi lab will also be presenting the following six papers in 3DV as well as showcasing new work in the Nectar track. Data-Efficient Inference of Neural Fluid Fields via SciML Foundation Model ACT-R: Adaptive Camera Trajectories for Single-View 3D Reconstruction HiT: Hierarchical Transformers for Unsupervised 3D Shape Abstraction iTACO: Interactable Digital Twins of Articulated Objects from Casually Captured RGBD Videos SemLayoutDiff: Semantic Layout Generation with Diffusion Model for Indoor Scene Synthesis HSM: Hierarchical Scene Motifs for Multi-Scale Indoor Scene Generation
December 14, 2025
GrUVi lab will once again have a good show at SIGGRAPH Asia 2025 (Hong Kong, Dec 15th to Dec 18th) with 5 papers.
December 14, 2025

GrUVi lab will once again have a good show at SIGGRAPH Asia 2025 (Hong Kong, Dec 15th to Dec 18th) with 5 papers. ART-DECO: Arbitrary Text Guidance for 3D Detailizer Construction ASIA: Adaptive 3D Segmentation using Few Image Annotations In-2-4D: Inbetweening from Two Single-View Images to 4D Generation Physics-Based Motion Imitation with Adversarial Differential Discriminators StableMotion: Training Motion Cleanup Models with Unpaired Corrupted Data
October 19, 2025
The International Conference on Computer Vision (ICCV), the premier conference on computer vision, will be held in-person at the Hawaii Convention Center in Honolulu from October 19-23, 2025. GrUVi lab will once again have a good show at ICCV 2025, with 4 workshops, 6 papers, and 3 invited talks.
Papers at the main conference
Papers at workshops
Talks
Workshops that we are co-organizing
October 19, 2025

The International Conference on Computer Vision (ICCV), the premier conference on computer vision, will be held in-person at the Hawaii Convention Center in Honolulu from October 19-23, 2025. GrUVi lab will once again have a good show at ICCV 2025, with 4 workshops, 6 papers, and 3 invited talks. Papers at the main conference Diorama: Unleashing Zero-shot Single-view 3D Scene Modeling NuiScene: Exploring Efficient Generation of Unbounded Outdoor Scenes Radiant Foam: Real-Time Differentiable Ray Tracing Global Motion Corresponder for 3D Point-Based Scene Interpolation under Large Motion StochasticSplats: Stochastic Rasterization for Sorting-Free 3D Gaussian Splatting RoMo: Robust Motion Segmentation Improves Structure from Motion Papers at workshops Hyperbolic Multimodal Representation Learning for Biological Taxonomies at the Beyond Eucliean Workshop Talks Prof. Angel will be giving invited talks at the Workshop on Open-Vocabulary 3D Scene Understanding and Workshop on Scalable 3D Scene Generation and Geometric Scene Understanding Prof. Manolis will be giving a talk at the Workshop on Generating Digital Twins from Images and Videos Workshops that we are co-organizing Andrea Tagliasacchi - GeoFreeNVS: Geometry-Free Novel View Synthesis and Controllable Video Models Angel Chang - AI for 3D Content Creation Angel Chang, Austin Wang, Yiming Zhang - CLVL: 6th Workshop on Closing the Loop Between Vision and Language Qirui Wu, Jiayi Liu - Workshop on Generating Digital Twins from Images and Videos
August 7, 2025
SIGGRAPH, the premier conference and exhibition dedicated to computer graphics and interactive techniques, will be held in-person at the Convention Centre in Vancouver, BC from August 10–14 2025. GrUVi lab will once again have a good show at SIGGRAPH 2025, with 7 technical papers. Prof. Richard Zhang and Prof. Ali Mahdavi-Amiri, will serve as the Technical Papers Chair and Session Chair, respectively.
Symposium on Computer Animation (SCA), the premier forum for innovations in the software and technology of computer animation, will take place in Vancouver, BC, from August 8-10, 2025. Prof. Jason Peng will serve as the local chair.
Please check out SFU news for more details.
August 7, 2025

SIGGRAPH, the premier conference and exhibition dedicated to computer graphics and interactive techniques, will be held in-person at the Convention Centre in Vancouver, BC from August 10–14 2025. GrUVi lab will once again have a good show at SIGGRAPH 2025, with 7 technical papers. Prof. Richard Zhang and Prof. Ali Mahdavi-Amiri, will serve as the Technical Papers Chair and Session Chair, respectively. Symposium on Computer Animation (SCA), the premier forum for innovations in the software and technology of computer animation, will take place in Vancouver, BC, from August 8-10, 2025. Prof. Jason Peng will serve as the local chair. Please check out SFU news for more details.
June 9, 2025
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), the premier conference on computer vision, will be held in-person at the Music City Center, Nashville on June 11-15, 2025. GrUVi lab will once again have a good show at CVPR 2025, with 1 workshop, 3 posters and 1 highlight paper, and 7 invited talks.
Here are the details of the accepted papers:
Here are the details of the invited talks:
June 9, 2025
![]()
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), the premier conference on computer vision, will be held in-person at the Music City Center, Nashville on June 11-15, 2025. GrUVi lab will once again have a good show at CVPR 2025, with 1 workshop, 3 posters and 1 highlight paper, and 7 invited talks. Here are the details of the accepted papers: AC3D: Analyzing and Improving 3D Camera Control in Video Diffusion Transformers PIAD: Pose and Illumination agnostic Anomaly Detection MoFlow: One-Step Flow Matching for Human Trajectory Forecasting via Implicit Maximum Likelihood Estimation based Distillation ArcPro: Architectural Programs for Structured 3D Abstraction of Sparse Points Here are the details of the invited talks: Prof. Angel Chang will give a talk at Workshop on Bridging Language, Vision and Action in 3D Environments Prof. Angel Chang will give a talk at Workshop on Compositional 3D Vision Prof. Angel Chang will give a talk at Workshop on 3D Vision Language Models (VLMs) for Robotic Manipulation Prof. Angel Chang will give a talk at Workshop on 3D Scene Understanding for Vision, Graphics, and Robotics Prof. Richard Zhang will give a talk at Workshop on 3D Digital Twin Prof. Richard Zhang will give a talk at Workshop on Ind3D: Enforcing Inductive Bias in 3D Generation Prof. Angelica Lim and Prof. Jason Peng will give talks at Workshop on Humanoid Agents
May 26, 2025
Graphics Interface (GI) is a unique conference for computer graphics and human-computer interaction. GI 2025 will be held in Kelowna, British Columbia, from May 26 to May 29, 2025. Prof. Parmit Chilana and Prof. Ali Mahdavi-Amiri are invited to give a talk in the conference.
May 26, 2025
Graphics Interface (GI) is a unique conference for computer graphics and human-computer interaction. GI 2025 will be held in Kelowna, British Columbia, from May 26 to May 29, 2025. Prof. Parmit Chilana and Prof. Ali Mahdavi-Amiri are invited to give a talk in the conference. https://graphicsinterface.org/conference/2025/speakers/
May 14, 2025
Congratulations to Prof. Richang Zhang for being elected to the **SIGGRAPH academy** for technical contributions in spectral and learning-based methods for geometric modeling.
The ACM SIGGRAPH Academy is an honorary group of individuals who have made substantial contributions to the field of computer graphics.
Please find the official announcement here: https://www.siggraph.org/award-winners/announcing-the-2025-award-winners
March 30, 2025
SIGGRAPH 2025 Technical Papers Committee meeting was held in Vancouver, at the SFU Harbour Center, March 27-28. The post TPC meeting workshop was held on March 29 with more than 20 invited speakers! Thank you to all the committee members and volunteers!
March 24, 2025
International Conference on 3D Vision (3DV) 2025, the premier conference on 3D Visiob, will be taking place in Singapore on March 25-28, 2025. GrUVi lab will once again have a good show at 3DV with 3 technical papers and “An object is worth 64x64 pixels: Generating 3d object via image diffusion” wining the best paper award!
3DV 2026 will be held in Vancouver. Prof. Manolis Savva will be serving as Conference Chair and Prof. Ali Mahdavi-Amiri will be the Program Chair. Congratulations to all the authors!
Here are the accepted papers:
December 3, 2024
SIGGRAPH Asia 2024, the premier conference on computer graphics, will be taking place from 3 – 6 December 2024 at the Tokyo International Forum (TIF), Tokyo, Japan. GrUVi lab will once again have a good show at SIGGRAPH Asia with 2 technical papers and Colorful Diffuse Intrinsic Image Decomposition in the Wild winning an SIGGRAPH Asia 2024 Best Paper Award Honorable Mention. Prof. Richard Zhang will be serving as Technical Papers Assistant Chair. Congratulations to all the authors!
And here is the accepted paper:
September 29, 2024
The European Conference on Computer Vision (ECCV), a biennial premier research conference in Computer Vision and Machine Learning, will be held from September 29, 2024 to October 4, 2024 in Mico Milano, Italy. In addition to all accepted papers, GrUVi lab will also stand out in organizing multiple workshops.
Here are the information of workshops organized by our amazing professors:
September 29, 2024
The European Conference on Computer Vision (ECCV), a biennial premier research conference in Computer Vision and Machine Learning, will be held from September 29, 2024 to October 4, 2024 in Mico Milano, Italy. GrUVi lab will once again have a good show at ECCV, with 9 technical papers.
Congratulations to all the authors!
And here are the 9 accepted papers:
July 28, 2024
SIGGRAPH, the premier conference on computer graphics, will be held from July 28, 2024 to August 1, 2024 in Denver, United States. GrUVi lab will once again have a good show at SIGGRAPG, with 6 technical papers. Congratulations to all the authors!
And here are the 6 accepted papers:
June 17, 2024
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), the premier conference on computer vision, will be held in-person in Seattle, washington on June 17-21, 2024. GrUVi lab will once again have a good show at CVPR 2024, with 4 keynotes, 2 oral papers, 4 spotlights and 10 posters.
For more details, please refer to SFU @ CVPR 2024 (Technical Participation)
Congratulations!
June 13, 2024
Congratulations to Jason Peng for receiving the CHCCS/SCDHM Graphics Interface Early Career Researcher Award.
The CHCCS/SCDHM, Graphics Interface Early Career Researcher Award, aims to recognize, support and encourage outstanding early career faculty members in the fields related to the Graphics Interface conference, which covers all aspects of graphics, human-computer interaction, and visualization. The award is given annually to up to two individuals and presented at the annual Graphics Interface conference.